Výsledky
Při zpracování jednotlivých případových studií byla otestována různá nastavení a přístupy. Na zařízeních byly nastaveny stejné hodnoty expozice a při zpracování byly použity stejná nastavení, aby mohly být výstupy porovnávány mezi sebou. Při testování bylo měněno rozlišení videa a snímková frekvence. Z důvodu složitosti nastavení programu Agisoft Metashape Professional, ve kterém probíhalo zpracování případových studií, byly vytvořeny dva skupinové procesy uložené do souboru XML, které lze importovat do programu při dalším testování. Tyto soubory jsou součástí výstupů a dostupné ke stažení z webu práce.
První případová studie – Kaplička
V případě první případové studie, která byla zpracovávána s pomocí UAV, bylo prokázáno, že snímková frekvence 25 FPS při rychlosti pohybu dronu 1,8 m/s má za následek vytvoření příliš velkého množství snímků a také příliš velký překryv, což vede k neúspěšnému zarovnání velkého množství snímků a časově náročnému zpracování. Pro výpočet překryvů snímkového letu se svislou kamerou byla vytvořena tabulka se vzorci v programu Microsoft Excel. Hlavním zdrojem byla podobně vytvořená tabulka na webových stránkách pix-pro.com. Vzorce pro výpočet parametrů byly čerpány právě z tohoto webu a také z webu calculatorsoup.com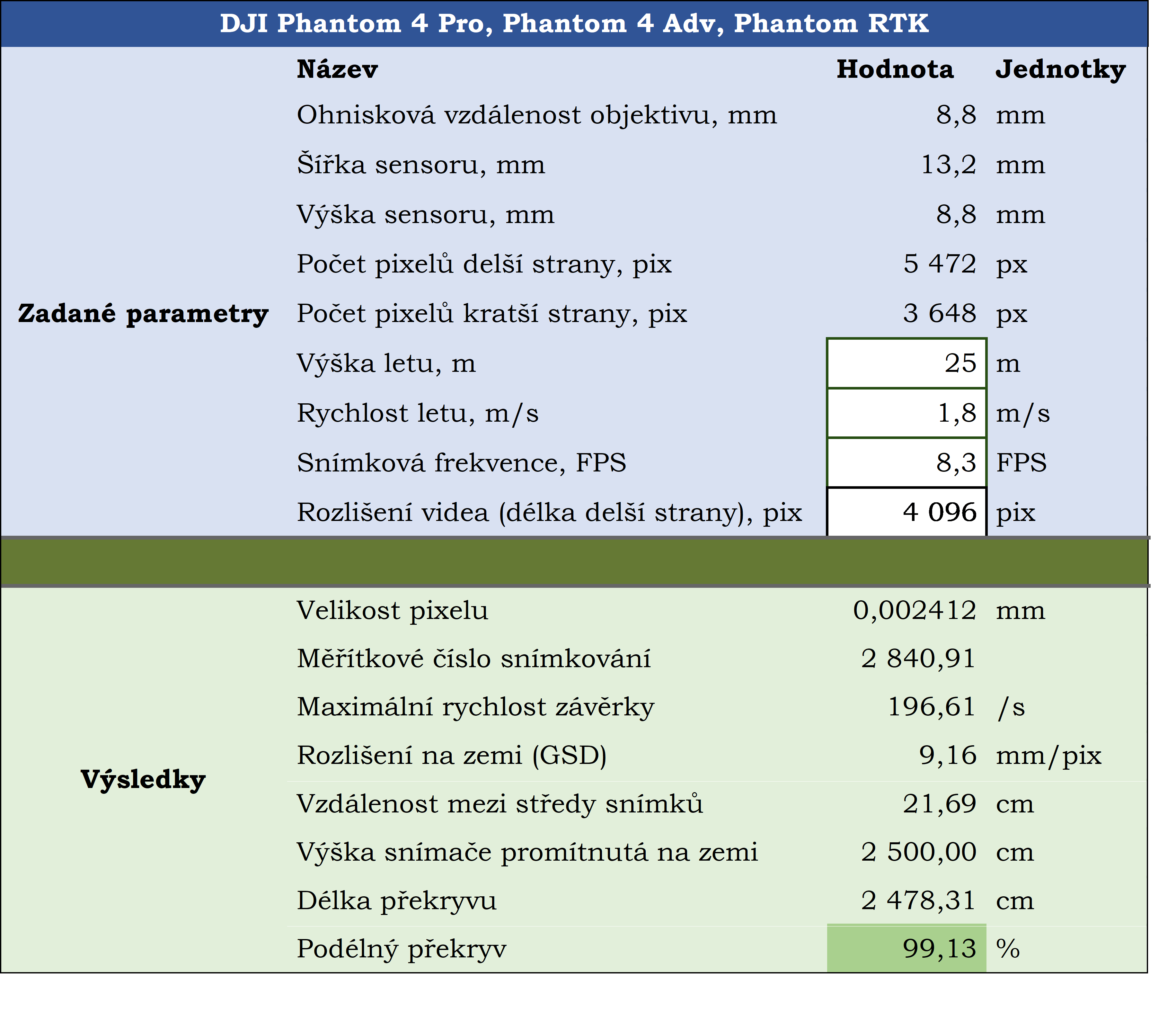
Dle výpočtů a testování je maximální vhodný překryv 99,13 %, tedy 8,33 FPS při rychlosti 1,8 m/s ve výšce 25 metrů nad zemí. Snímková frekvence 50 FPS nemohla být zpracována, což ovšem neznamená, že ji v žádných případech není možné využít. V případě, že by dron letěl rychlostí 10 m/s ve výšce 20 m nad zemí s odpovídající rychlostí závěrky, byly by podélné překryvy 99 %.
Dále bylo zjištěno, že let se šikmou kamerou okolo objektu zájmu s rozlišením 4K má výsledné rozlišení na zemi srovnatelné se snímkováním se svislou kamerou a rozlišením FHD. Další výhodou letu se šikmou kamerou je, že v tomto případě trvalo snímání pouze 30 sekund, zatímco při snímání podle plánu letu trvalo pět minut a také, že dalším výstupem může být 3D model, protože jsou nasnímány i svislé stěny. Hlavní nevýhodou tohoto zpracování je, že výsledná ortomozaika nedosahuje takové kvality, jako při snímání se svislou kamerou. Co se týče vlícovacích a kontrolních bodů jsou výsledky videogrammetrie srovnatelné s fotogrammetrií ve všech případech, kromě nastavení FHD 25 FPS, kdy byla naměřena odchylka trojnásobná, oproti ostatním nastavením. Důvod vzniku této odchylky nebyl nalezen.
Druhá případová studie – Kostka
Ve druhé případové studii bylo otestována metoda videogrammetrie na modelu malého rozměru. Testování probíhalo s pomocí fotoaparátu umístěném na autonomním robotickém vozidle, aby bylo zajištěna konstantní dráha a rychlost pohybu. Z naměřených hodnot lze porovnat nastavené rozlišení 4K a FHD při snímkové frekvenci 25 FPS. V tomto případě byly odchylky na vlícovacích a kontrolních bodech velmi podobné. Největší hodnoty byly naměřeny v ose Y. Při nastaveném rozlišení FHD je výsledná hodnota dvojnásobná než u rozlišení 4K, což má za následek horší rozlišení GSD. Při prvním testování byla vzdálenost mezi kamerou a objektem zájmu větší, díky čemuž měl výsledný model rovné plochy a neobsahoval chybně vzniklé fragmenty.Třetí případová studie – Budova
Třetí případová studie se setkala s významnými problémy během zpracování, což vedlo k obtížím při vyhodnocování a výsledná analýza nedopadla uspokojivě. Byl pořízen videozáznam zájmové oblasti, ze kterého byly následně zarovnány snímky s maximální úspěšností 66 % při nastaveném rozlišení 4K a 25 FPS. V ostatních případech bylo množství správně zarovnaných snímků mnohem nižší. Důvodem neúspěšného zarovnání je pravděpodobně směr pohybu při natáčení videa. V tomto případě byl směr pohybu přímý, namísto směru okolo objektu zájmu po kružnici. Následkem toho byly překryvy nedostatečné, a to i při snímkové frekvenci 50 FPS.Stanovení optimálního postupu
Optimální postup zpracování pro použití videa jako zdroje dat pro fotogrammetrii je nutné rozdělit dle způsobu snímání objektu, je-li pohyb kamery dle plánu letu a směr kamery svislý, postup, nastavení zpracování a výstupy jsou odlišné od snímání objektu se šikmou kamerou a pohybem okolo objektu zájmu. Dle zpracování třech případových studií je optimální rozlišení videa 4K a snímková frekvence 25 FPS. Kamery, se kterými byly vytvořeny videozáznamy neumožňovaly nastavení vyššího rozlišení a snímková frekvence 25 FPS byla optimální z důvoduSe svislou kamerou je nutné nejprve provést výpočty překryvů dle vytvořené kalkulačky a případně upravit nastavení letu a snímkové frekvence. Následuje rozmístění a zaměření vlícovacích a kontrolních bodů, samotný snímkový let se záznamem videa. Po těchto pracích v terénu je nutné další zpracování v programu Agisoft Metashape. V programu proběhne převedení videa na jednotlivé snímky a Spustí se skupinový proces číslo jedna pro Ortofoto, ve kterém jsou přednastaveny kroky k zarovnání snímků a tvorbě mesh. Následuje ruční přiřazení vlícovacích a kontrolních bodů na snímcích k zaměřeným souřadnicím na minimálně desíti odlišných snímcích pro každý bod. Poté se spustí Skupinový proces číslo dva pro Ortofoto, ve kterém je přednastavena optimalizace zarovnání kamer, tvorba mesh a bodového mračna a následně vytvoření DEM a Ortomozaiky.
V případě snímání se šikmou kamerou je vhodné rozmístit vlícovací a kontrolní body okolo objektu zájmu, a to i v případě, že by snímání probíhalo v podmínkách bez možnosti zaměření bodů pomocí GPS. V takovém případě se umístí model na milimetrový papír a body jsou zaznačeny v mřížce. Následuje pořízení videozáznamu, pokud možno při konstantní rychlosti po kružnici okolo objektu zájmu se šikmou kamerou. Poté následuje zpracování v programu Agisoft Metashape, kde je video převedeno na jednotlivé snímky. Následně se spustí Skupinový proces jedna pro model, při kterém dojde k zarovnání snímků a vytvoření mesh. Dále je nutné přiřadit vlícovací a kontrolní body na snímcích k zaměřeným souřadnicím. Následuje spuštění Skupinového procesu dva pro model, který optimalizuje zarovnání kamer, vytvoří bodové mračno, mesh a následně 3D model.
