Metody
Po nastudování problematiky byl navržen postup práce. Byla vybrána testovaná zařízení a podle nich i dostupná nastavení rozlišení a snímkové frekvence videa.
Zpracování případových studií probíhalo experimentálním způsobem. Zařízení a nastavení byla testována tak, aby mohla být mezi sebou porovnávána. V případě testování ve venkovním prostředí byla jednotlivá videa nahrávána bezprostředně po sobě, aby byly světelné podmínky co nejvíce podobné. V případě testování ve vnitřním prostředí byla kamera umístěna na zařízení s konstantní dráhou pohybu. Zároveň světelné podmínky byly konstantní pro všechna nastavení.
Použité metody
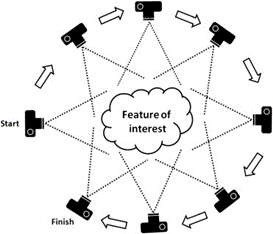
V rámci diplomové práce bylo provedeno několik experimentů s využitím metody Structure from Motion (SfM). Směrem pohybu okolo objektu zájmu se zabýval v roce 2012 Westoby ve své studii s názvem “‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications” (2012), stejně tak i Pavelka a kol. (2015). Oba uvedli, že fotografie je vhodné pořídit pravidelně okolo objektu s velkým překryvem 70 % - 80 % a ideálně v vněkolika řadách.
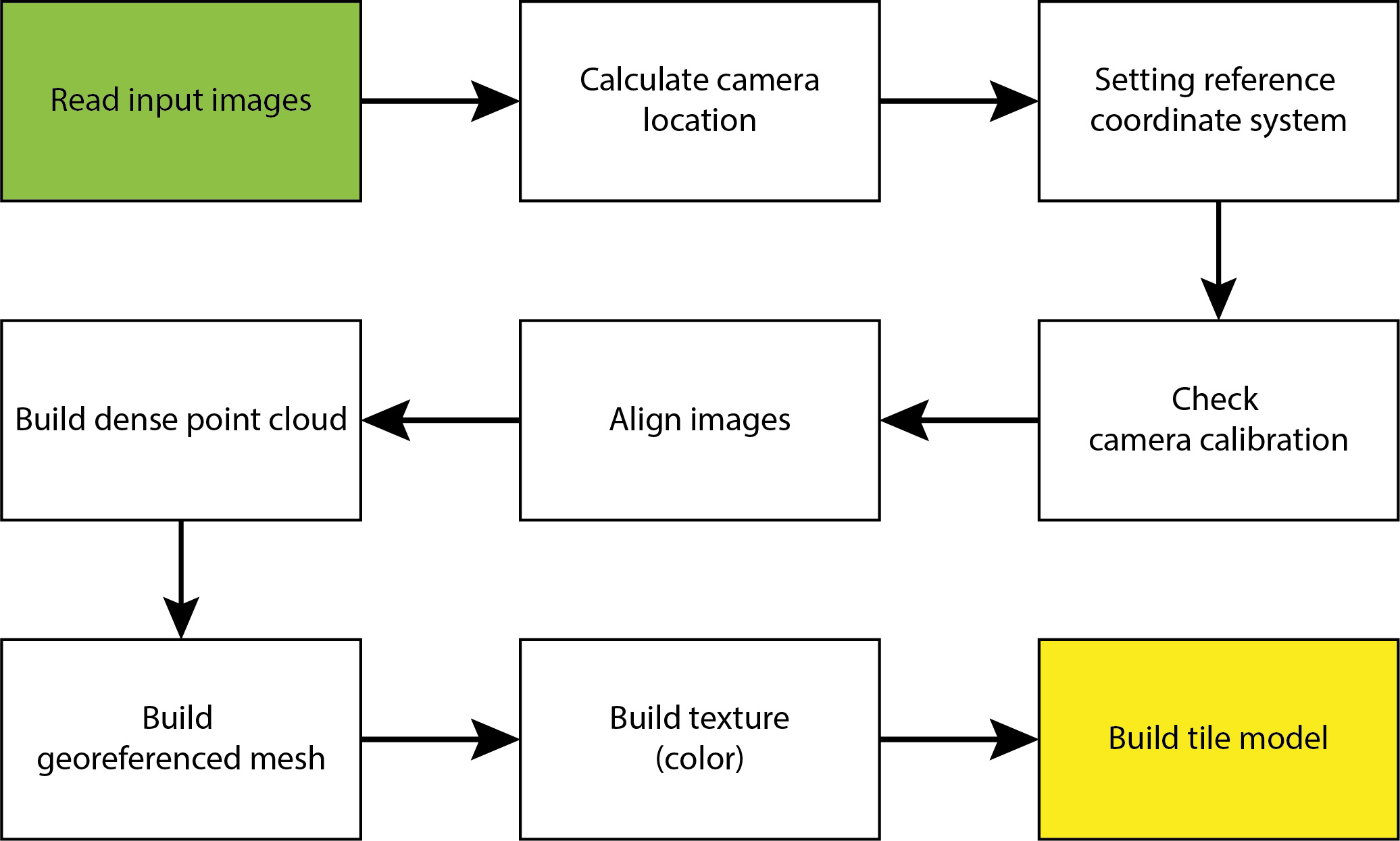
Poté jsou provedeny rekonstrukce trojrozměrného uspořádání scén a odhad pohybu kamery během celého záznamu. Detailně je celý proces znázorněn na následujícím obrázku:
Pro úplné porozumění experimentu je potřeba vymezit základní parametry videa, které byly předmětem testování. Mezi ně patří FPS (frames per second), což je sekvence snímků za sekundu. Vyšší hodnota FPS znamená plynulejší pohyb ve videu, tedy i vyšší procento překryvů a vyšší počet jednotlivých snímků z videa. Další důležitým parametrem je rozlišení videa. To udává počet pixelů v horizontálním a vertikálním směru. Vyšší rozlišení videa obvykle znamená lepší kvalitu obrazu, tedy i jednotlivých snímků, ale také větší velikost souboru. V dnešní době je nativní rozlišení Full HD, které nabízí 1920 × 1080 pixelů, mezi další standardy patří QHD, 2,7K, 4K a další.
Rolling shutter
Efekt rolující závěrky je zásadní vada snímače typu CMOS. Je způsobená čtením dat ze snímače především u elektronických závěrek kamer, kdy snímač zaznamenává obraz řádek po řádku, a proto je každý řádek exponován během jiného časového intervalu. Oproti tomu zařízení s global shutter exponují celý snímek v jeden moment. Tato vlastnost při vysokých rychlostech způsobuje, že svislé linie jsou zaznamenány jako šikmé, nebo že rotující vrtule letadla jsou deformovány. Řešením těchto problémů může být upravení rychlosti závěrky na dvojnásobek snímkové frekvence, což by ovšem mohlo způsobit smaz obrazu. Proto, je-li to možné, je řešením snížit rychlost pohybu kamery.Při testování všech případových studií nebyl zaznamenán vliv efektu rolling shutter na výsledné snímky z videa, což bylo způsobeno malou rychlostí pohybu. U dronu Phantom 4 Pro to prokázal i experiment od Bruno, Forlani (2023) kde uvádí, že při rychlosti do 2 m/s je zkreslení nepatrné.
Použité přístroje
DJI Phantom 4 Pro
Pro zpracování první případové studie bylo potřeba leteckého snímkování za použití UAV dronu DJI Phantom 4 Pro. Dron je vybaven vysokorychlostní kamerou schopnou natáčet video ve vysokém rozlišení a zachytit fotografie s vysokým rozlišením a jasnými detaily. Díky svému integrovanému systému GPS a pokročilému stabilizačnímu mechanismu dokáže dron udržovat stabilní polohu a plynulý let i při nepříznivých povětrnostních podmínkách.
Olympus fotoaparáty a objektivy
Pro zpracování druhé a třetí případové studie byly použity fotoaparáty značky Olympus. Konkrétně modely Olympus M1 Mark II a Olympus M10 Mark II. Na fotoaparátu Olympus byl při řešení první případové studie nasazen objektiv Olympus M.Zuiko Digital ED 12-40 mm f/2,8 Pro, nastaven na ohnisko 12 mm, respektive 24 mm při přepočtu na fullframe. Při testování třetí případové studie byly použity 2 fotoaparáty v jeden okamžik. První fotoaparát s objektivem Olympus M.Zuiko Digital ED 14-42mm f/3,5-5,6 EZ Pancake nastaveným na ohniskovou vzdálenost 17 mm, a druhý s objektivem Olympus M.Zuiko Digital ED 17 mm f/1,8.
Geodetická GPS Trimble R4
Pro zaměření vlícovacích a kontrolních bodů v první a třetí případové studii byla použita Geodetická GPS Trimble R4. Jedná se o vysoce spolehlivý geodetický přijímač GNSS, který umožňuje přesné určení polohy a sběr geodetických dat s vysokou přesností a spolehlivostí také díky přesnému určování polohy metodou RTK. Trimble R4 je vybaven širokou škálou funkcí a možností, včetně podpory více družicových systémů GNSS, což umožňuje získávat data i v obtížných terénních podmínkách nebo v urbanizovaných oblastech s omezenou viditelností satelitů. Pro nastavení a spuštění měření je zařízení vybaveno kontrolní jednotkou s operačním systémem Windows mobile. Pro správné přesné zaměření bodů je nutný přístup k internetu, který byl zprostředkován přes wifi hotspot z mobilního telefonu Xiaomi Redmi Note 9 Pro. Výška GNSS přijímače při měření byla 180 cm a doba měření jednotlivých bodů byla minimálně 5 sekund.
Autonomní robotické vozidlo
Pro testování druhé případové studie bylo vytvořeno zařízení, které udržovalo konstantní rychlost a směr pohybu. Vozidlo bylo vytvořeno ze stavebnice LEGO za použití elektromotorů a bateriového napájení a dálkového ovládání.
Mezi zařízení, která byla zavrhnuta z důvodu nevyhovujících požadavků, patří dron DJI Mavic Mini 1, protože neumožňuje plán letu. A mobilní telefon Xiaomi Redmi Note 9 Pro, který neumožňuje pokročilé nastavení expozice u videa.
Použitá data
Veškerá data zpracována v diplomové práci byla data primární, vytvořená autorem přímo pro tuto práci. Pořízená primární data jsou letecké snímky a videa zaznamenané z UAV a fotoaparátů. Fotografie byly pořízeny s rozlišením 20 Mpx ve formátu JPEG, videa byla nahrána ve formátu MOV s rozlišením 4K nebo FHD.
Použité programy
Pro plán letu, zaměření vlícovacích bodů a zpracování pořízených dat byly použity následující programy
Trimble Access
Trimble Access 2021.20 v kontrolní jednotce GPS Trimble R4 slouží pro nastavení metody měření, výšky přijímače a dalších. Po zaměření všech potřebných bodů v zájmové oblasti proběhl export bodů do souboru CSV a přenos do mobilního zařízení a následným přenos do počítače.
DJI Pilot
V mobilní aplikaci DJI Pilot verze v2.5.1.17 byl nastaven automatický plán letu i následné ruční ovládání při řešení první případové studie. Nastavení letového plánu pro fotogrammetrické snímkování 75% příčný a 80% podélný překryv, výška letu byla 25 m, rychlost letu 1,8 m/s. Podrobně je toto nastavení popsáno v kapitole První případová studie.
Agisoft Metashape Professional
Zpracování pořízených dat probíhalo v programu Agisoft Metashape Professional verze 2.0.3. Do programu byla nahrána pořízená data a po zarovnání snímků a zpracování hustého bodového mračna zpřesněného o vlícovací body následně vytvořeny výsledné ortofoto mozaiky, DEM a 3D modely.
Veškeré vlastnosti a nastavení programu Agisoft Metashape jsou podrobně popsány ve volně dostupném manuálu na webových stránkách. Pro účely této práce se však některá nastavení ukázala jako zásadní. Jedním z klíčových prvků každého projektu je zarovnání snímků pomocí nástroje Align photos, které zásadně ovlivňuje přesnost a dobu zpracování. Zvolení přesnosti při zarovnávání má významný dopad na výsledky. Například vysoká přesnost pracuje s fotografiemi původní velikosti, kdežto nastavení střední přesnosti způsobí zmenšení snímků dvakrát. Nastavení nízké přesnosti zmenší vstupní snímky až čtyřikrát, což může být v některých případech užitečné pro prvotní odhad polohy. Naopak nejvyšší přesnost zvětšuje vstupní snímky a je doporučeno spíše pro výzkumné účely."
Mezi pokročilé nastavení zarovnání snímků, použité v této práci, patří také nastavení parametrů limitu klíčových bodů. Toto číslo stanovuje horní limit počtu bodů na každém snímku, které je třeba vzít v úvahu během aktuální fáze zpracování. Například použití nulové hodnoty umožní programu najít co nejvíce klíčových bodů, což může vést k velké odchylce. Doporučená hodnota je 40 000.
Další důležitým parametrem je limit vázacích bodů, který udává horní limit vázacích bodů pro každý snímek. Doporučená hodnota je 4 000, která se zvyšuje, pokud je objekt malý a je potřeba vysoká přesnost.
Jedním z užitečných nástrojů je také Generic Preselection, který urychluje proces zpracování tím, že umožňuje výběr páru snímků, které mají být porovnány. Tato metoda vybírá překrývající se dvojice až po předběžné analýze fotografií s nižší přesností.
Mezi další možnosti patří funkce Exclude stationary tie points, která umožňuje vyloučit spojovací body, které zůstávají na místě na více různých snímcích. Toto nastavení by mělo být užitečné při zarovnávání fotografií se statickým pozadím, například v situaci, kdy je kamera pevně na místě a sledovaný objekt se otáčí na otočném podstavci. Tato funkce byla v rámci této práce otestována, nicméně bylo zjištěno, že její využití je omezené a nedosahuje očekávaných výsledků. Zarovnání fotografií s vyloučením stacionárních bodů vedlo k zarovnání pouze malého počtu vstupních snímků, což nebylo dostačující pro další zpracování.
Dále je zde možnost využít funkci Řízeného porovnávání snímků, které efektivně zvyšuje počet klíčových bodů na snímek bez výrazného prodloužení doby zpracování. Tento nástroj je vhodný zejména pro situace s fotografiemi s vegetací nebo s profesionálními kamerami s vysokým rozlišením.
Adaptivní model fotoaparátu je další užitečnou funkcí, která umožňuje automatický výběr parametrů kamery na základě jejich spolehlivosti. Tato funkce je užitečná při pořizování snímků budov z různých úhlů nebo v letových datech, kde pomáhá zabránit odchylkám některých parametrů.
MS Excel
Hodnoty z výstupních reportů byly porovnány a vizualizovány v programu MS Excel.
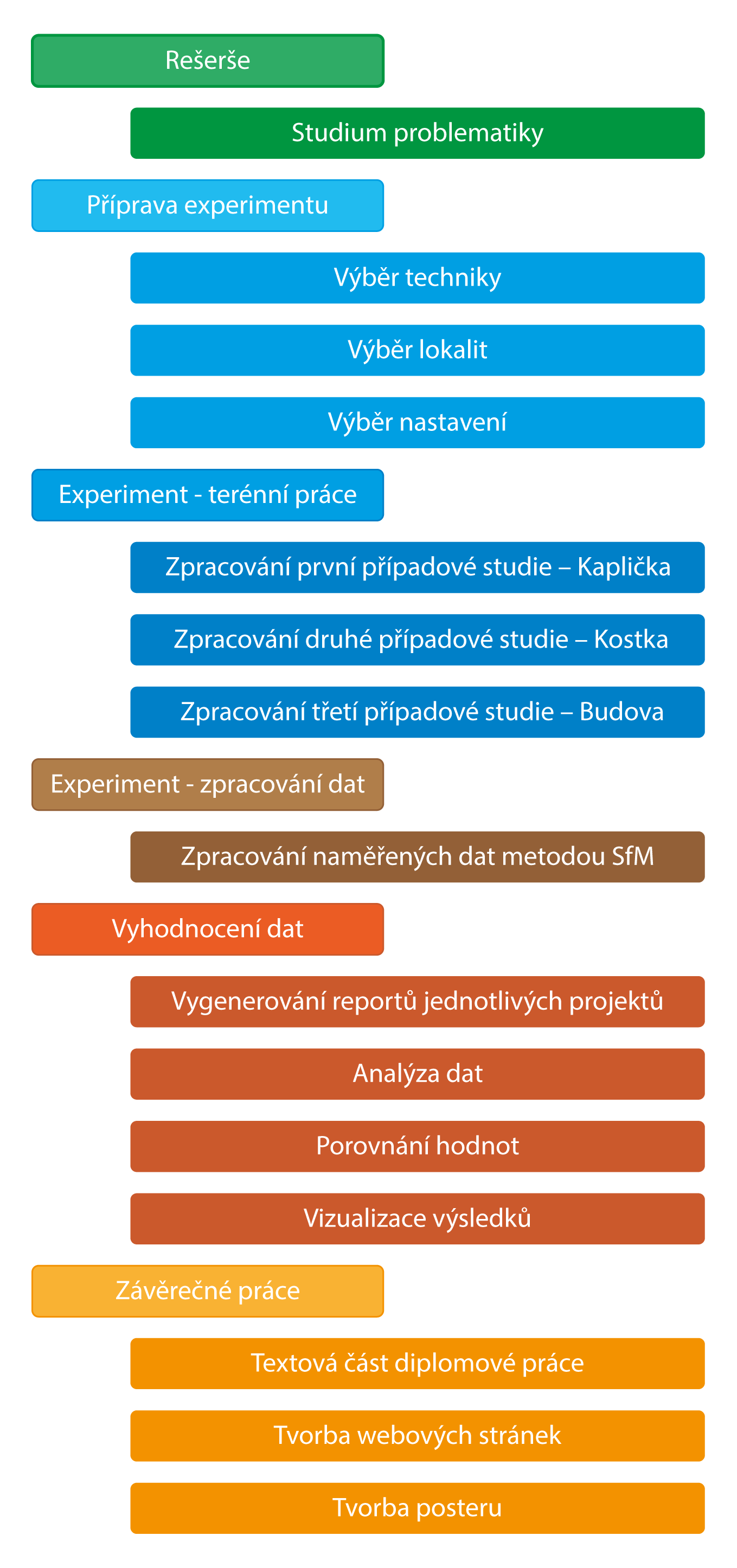
Postup zpracování
Postup zpracování je znázorněn na následujícím diagramu: